上海交通大學(xué)、上海AI Lab、香港大學(xué)、浙江大學(xué)以及香港中文大學(xué)的研究團隊近日聯(lián)合宣布了一項重大科研進展,他們成功研發(fā)出了一種新型算法,使人形機器人在多種復(fù)雜場景下具備了自主站起的能力。這項名為“學(xué)習(xí)跨多種姿勢的人形站立控制”的研究成果,標(biāo)志著人形機器人在直立控制技術(shù)上取得了重大突破。
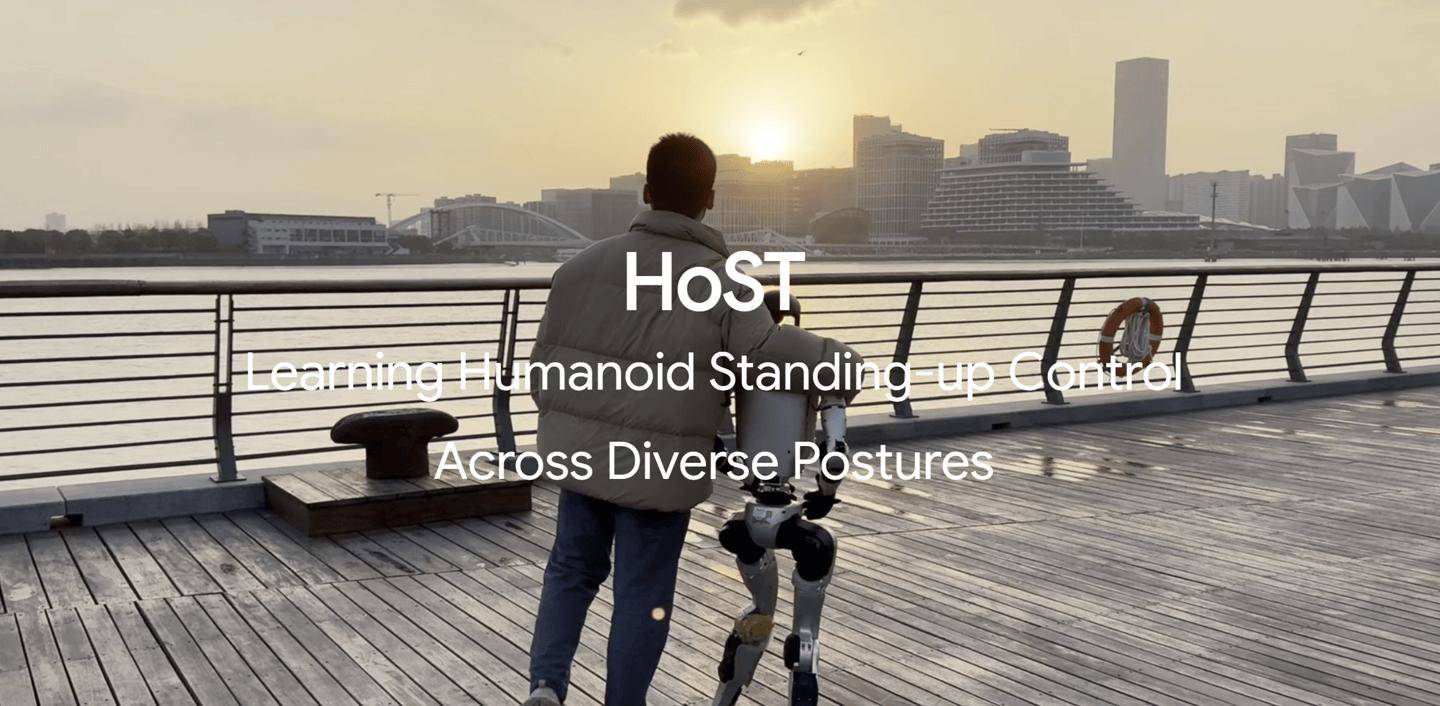
直立控制對于人形機器人的穩(wěn)定性和功能性至關(guān)重要。然而,現(xiàn)有的控制方法往往局限于模擬環(huán)境,忽略了硬件的實際約束,或者依賴于預(yù)設(shè)的地面特定運動軌跡,難以適應(yīng)現(xiàn)實世界中復(fù)雜多變的場景。為了解決這一問題,研究團隊創(chuàng)新性地提出了HoST算法,即人形站立控制具身智能控制學(xué)習(xí)算法。
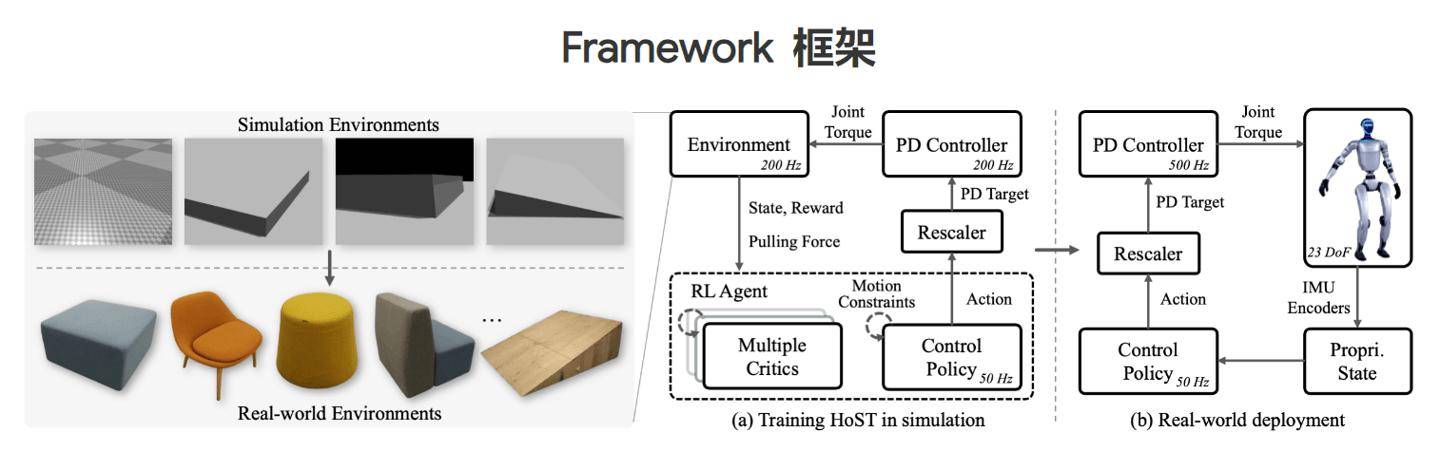
HoST算法是一個從零開始的強化學(xué)習(xí)框架,它能夠在模擬環(huán)境中學(xué)習(xí)站立控制策略,并將這些策略成功遷移到現(xiàn)實世界中。這一算法的核心優(yōu)勢在于其跨不同姿勢的模擬到現(xiàn)實遷移能力,使得人形機器人能夠在各種姿勢下都能實現(xiàn)平穩(wěn)、穩(wěn)定的站立。
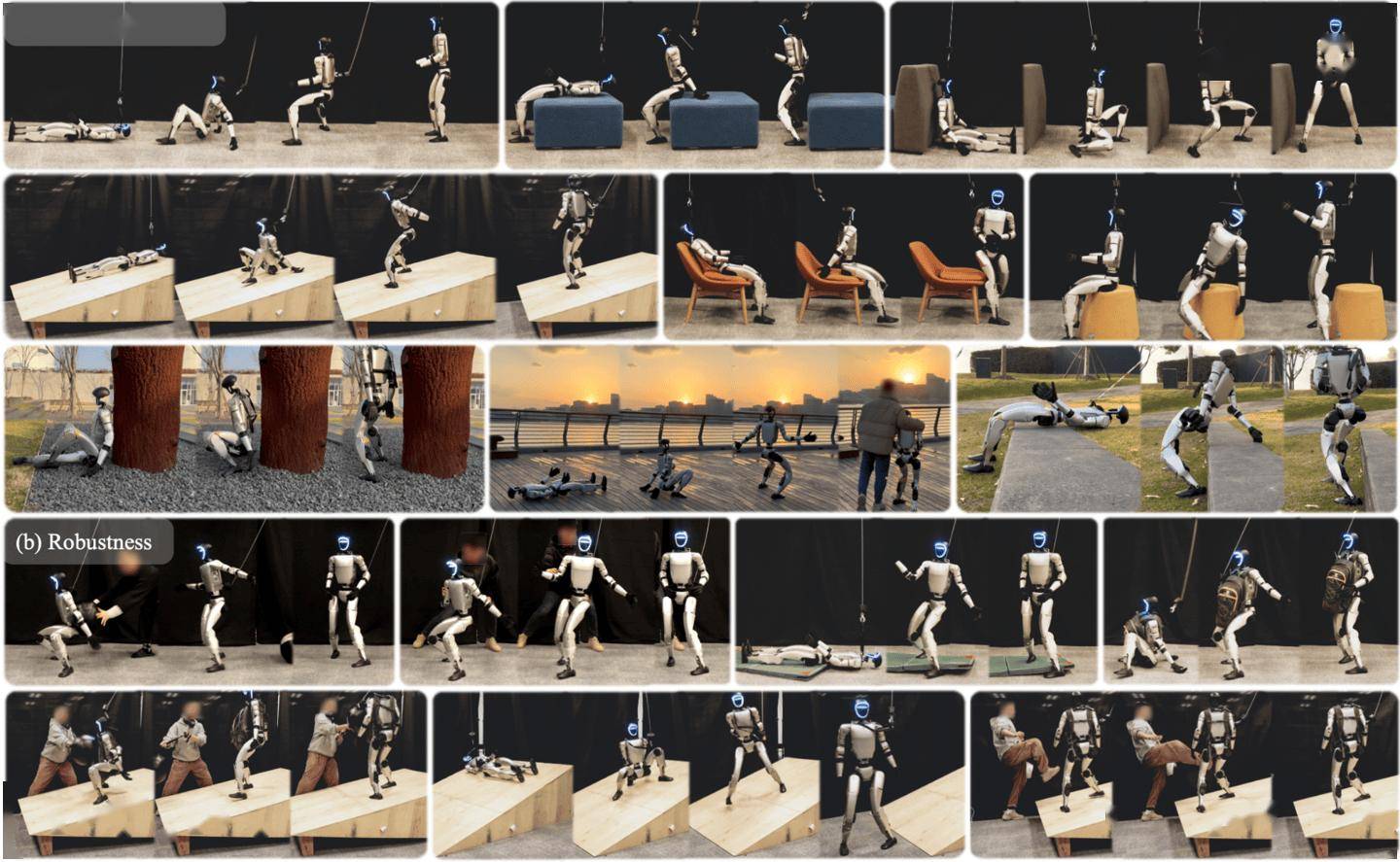
為了驗證HoST算法的有效性,研究團隊在宇樹Unitree G1人形機器人上進行了實驗。實驗場景涵蓋了木地板、草地斜坡、倚靠大樹、坐在臺階上、石子路以及靠在椅子上等多種復(fù)雜環(huán)境。實驗結(jié)果表明,采用HoST算法的人形機器人在這些場景中均能實現(xiàn)平穩(wěn)站立,展現(xiàn)出了出色的適應(yīng)性和穩(wěn)定性。
這一研究成果的發(fā)布,不僅為人形機器人的直立控制技術(shù)提供了新的思路和方法,也為未來人形機器人在更多復(fù)雜場景下的應(yīng)用奠定了堅實基礎(chǔ)。隨著技術(shù)的不斷進步和完善,相信人形機器人將在更多領(lǐng)域展現(xiàn)出其獨特的優(yōu)勢和價值。